

nnnnnPID(比例、积分、微分)控制算法是当代工业控制中最常用的算法之一,它是一种反馈控制算法,用于调节和稳定系统的输出,本文将详细介绍PID控制算法的原理和使用Python 3实现的示例。
n
一、PID控制算法简介
nnnn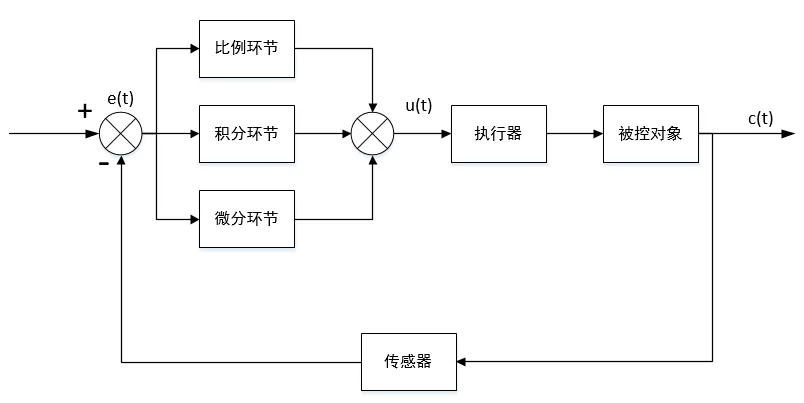
PID控制算法基于系统的误差信号来计算控制输出,并根据误差的大小、历史累积和变化趋势来调整控制动作。它的计算公式如下:
nnnn
- n
- Kp:比例增益,Kp与比例度成倒数关系 nnnn
- Tt:积分时间常数 nnnn
- TD:微分时间常数 nnnn
- u(t):PID控制器的输出信号 nnnn
- e(t):给定值r(t)与测量值之差 n
即:输出 = Kp * 偏差 + Ki * 积分项 + Kd * 微分项
nnnn- n
- Kp是比例增益,用于将偏差信号转换为控制输出的比例关系。 nnnn
- Ki是积分增益,用于修正系统的累积偏差。 nnnn
- Kd是微分增益,用于根据偏差变化的速率来调整控制输出。 n
PID控制算法的基本思想是通过比较系统的实际输出和期望输出(设定值),计算误差信号,并根据比例、积分和微分的权重来调整控制输出,使系统逐渐趋向期望状态。PID控制算法在各种自动控制系统中都有广泛的应用。:
nnnn- n
- 温度控制:在加热或冷却系统中,PID控制算法可以用于保持温度稳定。它根据实际温度和设定温度之间的差异来调整加热或冷却的输出。 nnnn
- 机器人控制:在机器人运动控制中,PID控制算法被广泛用于控制机器人的位置、速度和姿态。它可以帮助机器人实现精确的运动和轨迹跟踪。 nnnn
- 流量控制:在流体系统中,PID控制算法可用于控制流量阀门或泵的开度,以保持期望的流量水平。 nnnn
- 电机控制:PID控制算法在电机控制中也得到广泛应用,例如直流电机速度控制、步进电机定位控制等。 nnnn
- 航空航天领域:PID控制算法在航空航天系统中用于飞行姿态控制、自动驾驶、姿态稳定等方面。 nnnn
- 化工过程控制:在化工工艺中,PID控制算法被用于控制流量、温度、压力和液位等参数,以确保生产过程的稳定性和一致性。 nnnn
- 液压系统:液压系统中的PID控制算法可用于控制液压缸或液压阀的位置和压力,以实现精确的运动和力控制。 n
二、关键代码块
nnnn下面是使用Python 3实现PID控制算法的示例代码:
nnnnclass PIDController:n def __init__(self, Kp, Ki, Kd):n self.Kp = Kpn self.Ki = Kin self.Kd = Kdn self.error_sum = 0n self.last_error = 0n def compute(self, setpoint, feedback):n error = setpoint - feedbackn # Proportional termn P = self.Kp * errorn # Integral termn self.error_sum += errorn I = self.Ki * self.error_sumn # Derivative termn D = self.Kd * (error - self.last_error)n self.last_error = errorn output = P + I + Dn return output在上述示例中,我们定义了一个PIDController类,它具有三个参数Kp、Ki和Kd作为比例、积分和微分增益。compute方法接收设定值(setpoint)和反馈值(feedback),并返回PID控制器的输出。
示例的用法如下:
nnnn# 创建PID控制器实例npid_controller = PIDController(Kp=0.5, Ki=0.2, Kd=0.1)n# 设置设定值和初始反馈值nsetpoint = 50nfeedback = 0n# 进行PID控制nfor _ in range(100):n output = pid_controller.compute(setpoint, feedback)n # 在这里将输出应用于实际系统n # 获取新的反馈值n feedback = get_feedback()在实际应用中,你需要根据系统的特性和性能要求来调整PID控制器的增益参数,以获得最佳的控制效果。
nnnn三、完整实例场景
nnnn模拟了一个温度控制系统,使用PID控制算法根据设定温度和反馈温度来调整控制输出。在每次循环中,计算PID控制输出并将其应用于模拟的温度系统。通过输出当前温度和控制输出,您可以观察到PID控制算法如何调整控制输出以逐渐接近设定温度。设定初始温度(self.temperature = 25.0)、目标温度(setpoint = 50.0),每次循环控制台打印上次控制后,返回的当前温度(feedback)和下次要控制改变的温度大小(output)。
import timenclass PIDController:n def __init__(self, Kp, Ki, Kd):n self.Kp = Kpn self.Ki = Kin self.Kd = Kdn self.error_sum = 0n self.last_error = 0n self.last_time = Nonen def compute(self, setpoint, feedback):n # 计算时间间隔n current_time = time.time()n if self.last_time is None:n self.last_time = current_timen dt = current_time - self.last_timen # 计算误差n error = setpoint - feedbackn # 比例项n P = self.Kp * errorn # 积分项n self.error_sum += error * dtn I = self.Ki * self.error_sumn # 微分项n if dt != 0:n D = self.Kd * (error - self.last_error) / dtn else:n D = 0n # 计算控制输出n output = P + I + Dn # 更新上一次的误差和时间n self.last_error = errorn self.last_time = current_timen return outputn# 模拟温度系统nclass TemperatureSystem:n def __init__(self):n self.temperature = 25.0 # 初始温度n def update_temperature(self, power):n # 模拟温度变化n delta_t = power * 0.01 # 温度变化速率n self.temperature += delta_tn def get_temperature(self):n # 获取当前温度n return self.temperaturen# 创建PID控制器实例npid_controller = PIDController(Kp=0.5, Ki=0.2, Kd=0.1)n# 创建温度系统实例ntemperature_system = TemperatureSystem()n# 设置设定温度和初始反馈温度nsetpoint = 50.0nfeedback = temperature_system.get_temperature()n# 进行PID控制nfor _ in range(100):n # 计算PID控制输出n output = pid_controller.compute(setpoint, feedback)n # 限制控制输出在合理范围n output = max(min(output, 100.0), 0.0)n # 将控制输出应用于温度系统n temperature_system.update_temperature(output)n # 获取新的反馈温度n feedback = temperature_system.get_temperature()n # 输出当前温度和控制输出n print(f"Temperature: {feedback:.2f} Output: {output:.2f}")n time.sleep(0.1) # 模拟采样时间间隔
Comments NOTHING